 Lors du crash de l’Airbus A320 de Germanwings (24 mars 2015), de nombreuses personnes ont découvert l’existence de FlightRadar24.
Lors du crash de l’Airbus A320 de Germanwings (24 mars 2015), de nombreuses personnes ont découvert l’existence de FlightRadar24.
FlightRadar24 regroupe les données ADS-B (Automatic Dependent Surveillance-Broadcast) fournies par plusieurs milliers de récepteurs répartis à la surface du globe. Ces récepteurs sont mis en œuvre par des personnes qui participent ainsi au fonctionnement de ce système international. D’ailleurs FlightRadar24 fournit des systèmes de réception à ceux qui en font la demande et qui sont éligibles du fait de leur position géographique dans une zone encore mal couverte.
Un Raspberry Pi pour suivre les avions sur FlightRadar24
Comment ça marche, l’ADS-B ?

Principe de l’ADS-B – Source FlightRadar24 ©
La technologie que FlightRadar24 utilise pour recevoir des informations de vol est appelée ADS-B. Cette technologie est illustrée sur l’image ci-dessus.
- L’avion récupère sa localisation à partir d’un récepteur GPS
- Le transpondeur ADS-B installé sur l’avion transmet un signal à 1090 MHz contenant cette information de position ainsi que d’autres données (N° du vol et indicatif, altitude, vitesse, vitesse ascensionnelle…)
- Le signal du transpondeur ADS-B est capté par un récepteur au sol, connecté aux serveurs de FlightRadar24
- Le récepteur envoie les données reçues à Flightradar24
- Les données s’affichent sur www.flightradar24.com et les applications FlightRadar24
Transpondeur ADS-B
ADS-B est une technologie relativement nouvelle et toujours en cours de développement ce qui signifie qu’actuellement elle est rarement utilisé pour le contrôle de la circulation aérienne. FlightRadar24 estime que près de 65% des avions commerciaux transportant des passagers (75% en Europe, 35% aux États-Unis) sont équipés d’un transpondeur ADS-B. Pour l’aviation en général ce nombre est probablement inférieur à 20%. Mais ce pourcentage est en constante augmentation et l’ADS-B deviendra obligatoire mondialement pour la plupart des avions en 2020. Lorsqu’il sera obligatoire, l’ADS-B remplacera les radars primaires comme méthode de surveillance aérienne utilisé par l’ATC.

Transpondeur ADS-B
FlightRadar24 (basée à Stockholm) dispose d’un réseau de plus de 6000 récepteurs ADS-B répartis dans le monde qui reçoivent les informations de vol des avions équipés de transpondeur ADS-B et renvoie ces informations à ses serveurs. En raison de la haute fréquence utilisée (1 090 MHz) la couverture de chaque récepteur est limitée à environ 250 à 400 km autour de l’antenne en fonction de l’endroit où elle est implantée. Plus un avion vole loin du récepteur plus il doit voler haut pour être dans la zone couverte par le récepteur. La portée maximale fait qu’il est très difficile d’obtenir une couverture ADS-B au-dessus des océans.
Environ 99% de l’Europe est couverte de récepteurs ADS-B. Il ya aussi une bonne couverture ADS-B aux Etats-Unis, Canada, Mexique, Caraïbes, Brésil, Russie, Moyen-Orient, Inde, Japon, Thaïlande, Malaisie, Indonésie, Australie et Nouvelle-Zélande. Dans les autres parties du monde, la couverture ADS-B est très variable.
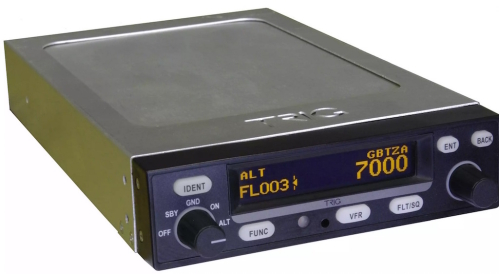
Les transpondeurs et antennes sur avion
Il existe de nombreux modèles de transpondeurs pour avion, comme ceux qui figurent plus haut dans l’article.
 Celui-ci est en deux partie, avec un élément de commande qui peut se monter sur le tableau de bord, et un bloc électronique déporté.
Celui-ci est en deux partie, avec un élément de commande qui peut se monter sur le tableau de bord, et un bloc électronique déporté.
 Cet ensemble (qui intègre un transpondeur présenté plus haut) est équipé d’un afficheur qui permet au pilote de voir les appareils équipés d’un ADS-B sur une carte. Ceci améliore la sécurité des vols.
Cet ensemble (qui intègre un transpondeur présenté plus haut) est équipé d’un afficheur qui permet au pilote de voir les appareils équipés d’un ADS-B sur une carte. Ceci améliore la sécurité des vols.
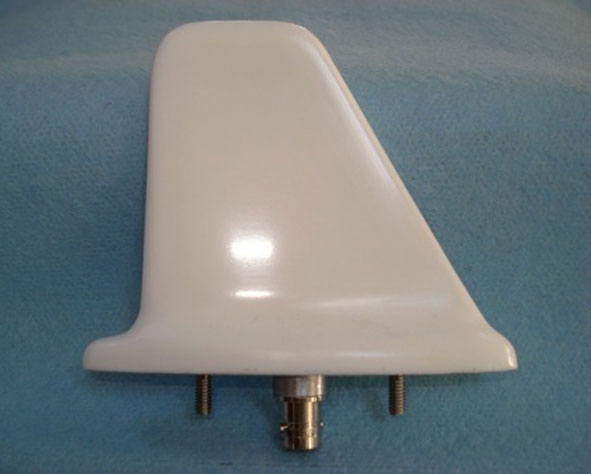 Les antennes peuvent également revêtir des apparences différentes, mais le plus souvent c’est ce type d’antenne qui est utilisé.
Les antennes peuvent également revêtir des apparences différentes, mais le plus souvent c’est ce type d’antenne qui est utilisé.

Les récepteurs
FR24
Côté réception beaucoup de possibilités existent. en dehors des matériels professionnels ci-dessus.
 FlightRadar24 offre ce modèle pour équiper les stations situées dans des zones qui sont intéressantes pour le service (zones mal ou peu couvertes).
FlightRadar24 offre ce modèle pour équiper les stations situées dans des zones qui sont intéressantes pour le service (zones mal ou peu couvertes).
Caractéristiques
- Processeur embarqué – opérationnel sans ordinateur
- Formats reçus : 1090 MHz Mode S, ADS-B et Mode-AC
- Plage de réception : plus de 225 Km (en fonction de la qualité de l’antenne et de son emplacement)
- Vitesse de traitement : plus de 1600 trames Mode-S par seconde (dans les zones à fort trafic)
- Horodatage en mode 12Mhz ou haute résolution en mode GPS
- IP automatiquement attribué par DHCP
- Fonctionne derrière un NAT
- Consommation d’énergie : moins de 5W
- Consommation bande passante : 200 à 800 Mo / mois en fonction de la couverture

L’antenne fournie par FlightRadar24
Contenu du kit de réception fourni par FlightRadar24
- Le récepteur FR24 ADS-B
- L’antenne GPS avec 5 m de câble
- Une alimentation continue (entrée 110V-230V ~)
- 5 m de câble Ethernet
- Une antenne mode S de 38 cm de long avec système de montage (0 dBd de gain, 55 cm de long, étanche)
- Un câble coaxial de 5 ou 10 mètres de long pour antenne mode-S, avec connecteur. Câble de type H155 de 6 mm de diamètre à faible perte. Câble équipé avec connecteur SMA mâle et connecteur de type N
Le stick FlightRadar24
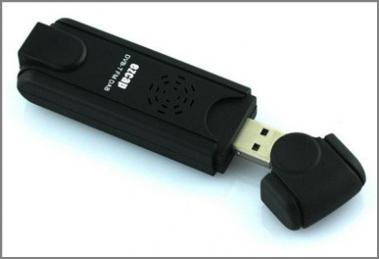
 Sur la boutique la boutique jetvision vous trouverez les solutions de récepteur DVB-T (Digital Video Broadcast – Terrestrial) préconisées par FlightRadar24. Il existe une version avec la petite antenne représentée ci-dessus (23€) mais vous pouvez choisir une antenne extérieure de meilleure qualité (78€).
Sur la boutique la boutique jetvision vous trouverez les solutions de récepteur DVB-T (Digital Video Broadcast – Terrestrial) préconisées par FlightRadar24. Il existe une version avec la petite antenne représentée ci-dessus (23€) mais vous pouvez choisir une antenne extérieure de meilleure qualité (78€).
La solution d’Erik
Sur blogwifi.fr, Erick d’Infracom a publié un article sur la réception de l’ADS-B avec un récepteur USB DVB-T et un Raspberry Pi. La framboise est utilisée pour décoder les signaux, les afficher et envoyer les trames à FlightRadar24. Il a aussi réalisé une antenne colinéaire pour améliorer la réception
Le projet
Une grande partie des avions est équipée d’un transpondeur, chargé de diffuser des informations destinées à assurer la sécurité aérienne, mais accessibles à ceux qui souhaitent les écouter. On y retrouve l’altitude, la vitesse, le cap, etc. L’avion va donc se faire « voir » des autres avions et du contrôle au sol, mais également de la station au sol réalisée par Erik pour recevoir les données, via un RaspberryPi, pour ensuite les diffuser sur le site FlightRadar24.
L’idée est de contribuer au site, en apportant une nouvelle zone de couverture sur la région de St Nazaire, région peu couverte lorsque les avions sont à basse altitude, comme le montre le suivi de la navette Airbus St Nazaire / Toulouse un matin :
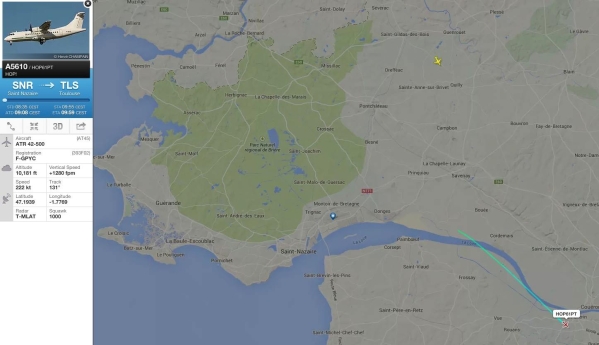 On ne voit rien du décollage de St-Nazaire, la trace ne débute que lorsque l’avion dépasse les 5000 pieds (1,5 Km) environ, et encore. Depuis Crossac, il devrait être possible de pouvoir améliorer cette couverture qui semble un peu faible, et ainsi suivre les Beluga qui se posent à St-Nazaire, suivre les avions en exercice, les avions de tourisme qui découvrent la côte et les marais de Brière, etc.
On ne voit rien du décollage de St-Nazaire, la trace ne débute que lorsque l’avion dépasse les 5000 pieds (1,5 Km) environ, et encore. Depuis Crossac, il devrait être possible de pouvoir améliorer cette couverture qui semble un peu faible, et ainsi suivre les Beluga qui se posent à St-Nazaire, suivre les avions en exercice, les avions de tourisme qui découvrent la côte et les marais de Brière, etc.
Comme tout ce qui tourne autour de la radio, tout commence par l’antenne ! Il y a un proverbe radioamateur qui dit « Ce que vaut l’antenne, vaut la station »… Et qui dit bonne antenne, dit antenne maison  : une colinéaire, taillée pour fonctionner sur 1090 MHz, la fréquence de l’ADS-B !
: une colinéaire, taillée pour fonctionner sur 1090 MHz, la fréquence de l’ADS-B !
L’antenne
Antenne colinéaire d’Erik en cours de construction
Je vous entends déjà : oulaaa, compliqué, impossible, marchera jamais !! Allez, courage, un peu de câble 75 Ohm pour satellite, et prenez bien un câble avec une âme pleine (avec une âme PLEINE, pas multi-brins), et un p’tit tuto sur Youtube :
Pas compliqué non ? Ce que le tuto oublie de dire : ajoutez deux brins à la fois, il faut, au final, avoir un nombre PAIR de brins, très important…
 Venons maintenant rajouter un connecteur en bricolant un peu :
Venons maintenant rajouter un connecteur en bricolant un peu :
 Par rapport à la vidéo, Erik a utilisé de la gaine thermo-rétractable pour solidifier, pas du scotch. Le câble qui va de l’antenne au récepteur USB DVB-T est lui en H155, faibles pertes, utilisable jusqu’à 5 GHz environ, donc parfaitement adapté pour une simple réception. Erik a ensuite réalisé un petit pigtail (petit bout de câble servant d’adaptateur) MCX / N femelle pour venir sur le module USB, avec du RG316. C’est par contre un petit peu moins accessible au bricoleur lambda, sauf si vous disposez des outils pour réaliser le sertissage.
Par rapport à la vidéo, Erik a utilisé de la gaine thermo-rétractable pour solidifier, pas du scotch. Le câble qui va de l’antenne au récepteur USB DVB-T est lui en H155, faibles pertes, utilisable jusqu’à 5 GHz environ, donc parfaitement adapté pour une simple réception. Erik a ensuite réalisé un petit pigtail (petit bout de câble servant d’adaptateur) MCX / N femelle pour venir sur le module USB, avec du RG316. C’est par contre un petit peu moins accessible au bricoleur lambda, sauf si vous disposez des outils pour réaliser le sertissage.
Avec un petit peu plus de matériel, l’antenne a pris forme, elle a surtout bénéficié d’un habillage de protection, de façon à résister à un usage extérieur :
 La voici par exemple avant sa finalisation, ouverte. Les matériaux sont simples : un tube PVC diam. 30 coupé à la bonne dimension, des embouts pour le fermer et un vague coup de bombe de peinture blanche pour ne pas effrayer des voisins un peu bizarres
La voici par exemple avant sa finalisation, ouverte. Les matériaux sont simples : un tube PVC diam. 30 coupé à la bonne dimension, des embouts pour le fermer et un vague coup de bombe de peinture blanche pour ne pas effrayer des voisins un peu bizarres ![]()
Un peu de colle PVC et hop, voici une antenne prête à être installée au bout d’un mât :

Un câble H155 de 4 m vient s’y raccorder, en connectique N mâle. Sur la clé de réception, Erik a assemblé un adaptateur MCX / N femelle tout simple, en attendant de recevoir un adaptateur coaxial pour réduire encore un brin les pertes en ligne.
Une fois montée, l’antenne a fière allure :
 Direction l’iMac et surprise… surprise quant à la couverture désormais atteinte, je vous laisse juger par vous même le résultat d’une capture effectuée un matin :
Direction l’iMac et surprise… surprise quant à la couverture désormais atteinte, je vous laisse juger par vous même le résultat d’une capture effectuée un matin :

Oui c’est dingue, les avions sont reçus pratiquement jusqu’à Paris ! Certes, ils sont en niveau de vol, pas à 200 m du sol, mais quand même, c’est dingue, considérant que l’antenne n’est qu’à 4 m du sol, et encore, avec des obstacles proches.
Rapide mesure en voyant un appareil au Havre et calcul de la distance qui le sépare du récepteur :
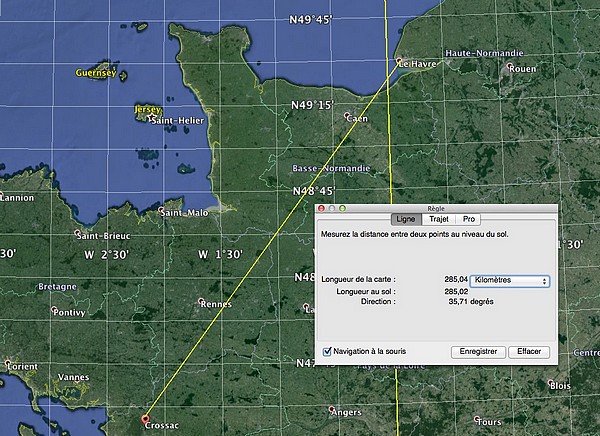
285 km, soit environ 154 Nm, plutôt pas mal non? Encourageant en tout cas pour aller fixer l’antenne tout en haut, sur le toit. Reste désormais à trouver LA bonne solution pour un montage extérieur durable :
- antenne et raspberry sur le toit, avec une alimentation PoE
- antenne seule sur le toit, avec un minimum de câble très faibles pertes (Aircom)
Pour obtenir une solution cohérente et sans trop de pertes radio, on peut envisager de placer le Raspberry dans un boîtier étanche, le munir d’un POE (vous trouverez un exemple de timelapse qui fonctionne sans interruption depuis 2014 sur https://blogwifi.fr/?p=12741), et limiter les liaisons coaxiales vers l’antenne au strict minimum, par exemple en fixant une embase N Femelle sur le boîtier étanche. Le Raspberry Pi et le récepteur DVB-T sont placés le plus près possible de l’antenne et un simple câble Ethernet blindé suffira à venir alimenter le tout et récupérer le réseau.
D’autres antennes ?
La solution d’Erik est excellente pour la réception, mais pour démarrer et faire vos essais vous pouvez commencer par des antennes simples :
Nota : Quelle que soit l’antenne utilisée, elle devra respecter la polarisation verticale du signal pour une réception optimale. L’antenne sera donc disposée verticalement.
La plus simple !
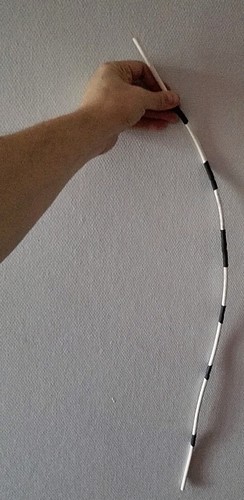
 Une antenne réduite à sa plus simple expression : dénudez le câble coaxial pour satellite (75Ω) torsadez la tresse, donnez la forme d’un dipôle (voir photo) et coupez (de façon symétrique) pour que la longueur totale soit de 13,7 cm… à peu près.
Une antenne réduite à sa plus simple expression : dénudez le câble coaxial pour satellite (75Ω) torsadez la tresse, donnez la forme d’un dipôle (voir photo) et coupez (de façon symétrique) pour que la longueur totale soit de 13,7 cm… à peu près.
Si vous trouvez plus simple, dites moi…
Avec un bouchon…
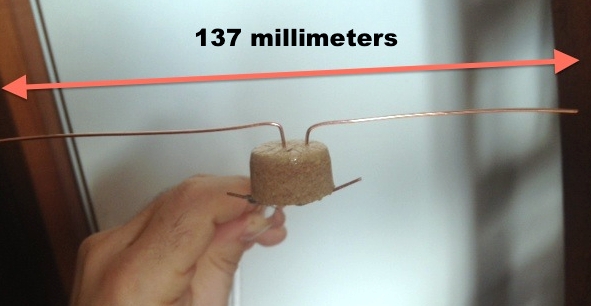
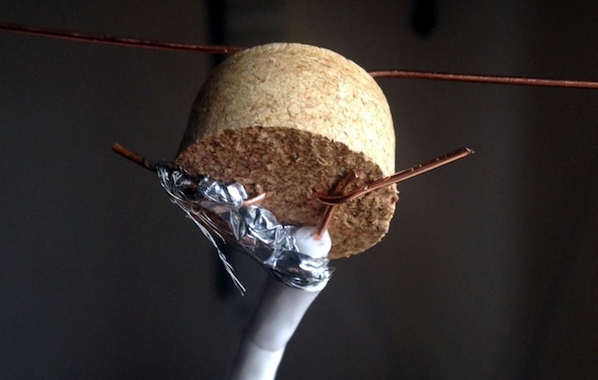
 En trois images c’est clair, pas besoin de beaucoup d’explications… Et ici, en Bourgogne, des bouchons ça va, on en récupère pas mal
En trois images c’est clair, pas besoin de beaucoup d’explications… Et ici, en Bourgogne, des bouchons ça va, on en récupère pas mal
Un peu plus compliqué…
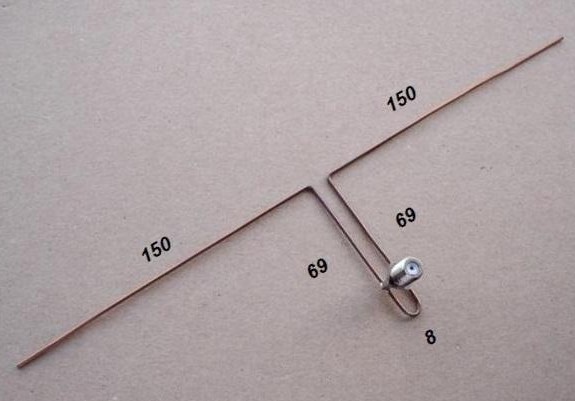 Cette antenne est un peu plus complexe mais offre une bonne adaptation…
Cette antenne est un peu plus complexe mais offre une bonne adaptation…
Longueur totale du fil : 150 + 69 +8 + 69 + 150 = 446 mm
Antenne active 1090 MHz de F5ANN
 |
Pour améliorer les performances de l’antenne 1090 MHz, la solution la plus simple est d’ajouter un préamplificateur juste derrière l’antenne. Cependant compte tenu de la technologie de l’antenne sur circuit imprimé, il est possible de transformer cette antenne en antenne active en ajoutant sur le même circuit imprimé un amplificateur faible bruit avec un gain de 20 à 30 dB, et pour s’affranchir des problèmes d’interférences avec les fréquences GSM, d’intégrer un filtre 1090 MHz de type SAW avec une bande passante de 30 MHz, ou moins. On arrive ainsi à avoir une antenne de faible dimensions – 160 mm de longueur – avec un gain important et permettant d’avoir un facteur de bruit de la chaine réception très faible – inférieur à 1 dB-(d’après F5ANN un site incontournable pour l’ADS-B)Si vous aimez bricoler les antennes cherchez donc avec les mots clés suivants : ads-b antenna diy |
Un préampli à faible bruit (LNA)
Si vous avez une expérience de la soudure, si vous tremblez en même temps que le circuit que vous soudez, si le mot CMS (Composant Monté en Surface) ne vous effraye pas… vous trouverez chez jetvision un kit de préampli pour une cinquantaine d’euros…
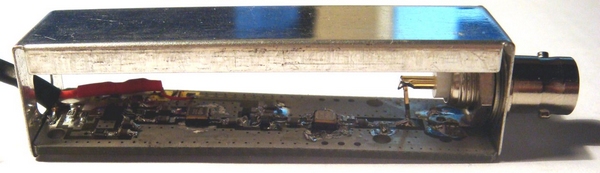
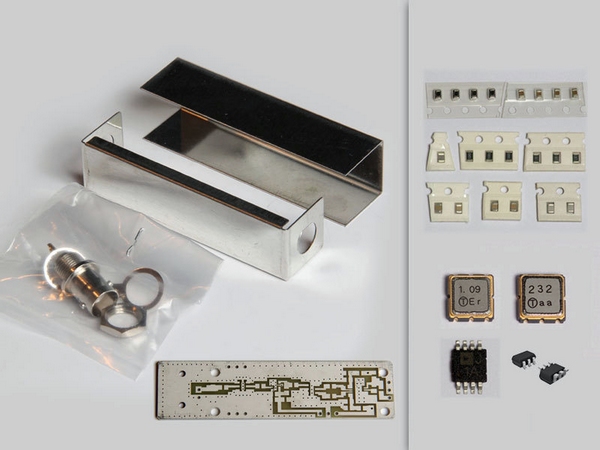 Une fois monté le préampli est inséré dans son boîtier qui assure la protection contre les interférences :
Une fois monté le préampli est inséré dans son boîtier qui assure la protection contre les interférences :
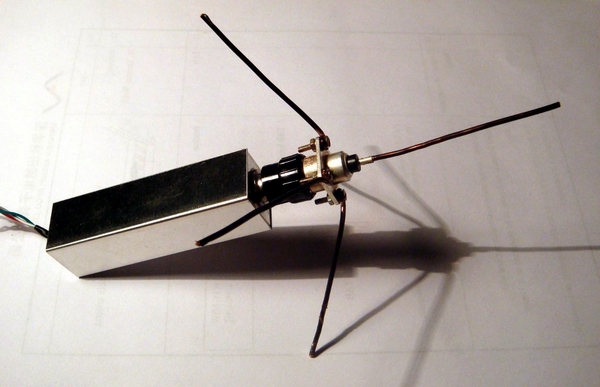
 Le préampli est placé au plus près de l’antenne (ici une ground-plane montée directement sur une prise N) :
Le préampli est placé au plus près de l’antenne (ici une ground-plane montée directement sur une prise N) :
Le récepteur
Le récepteur doit être basé sur le chipset Realtek RTL2832U. Les numéros de type sont E4000 et R820T. Ils peuvent facilement être trouvés sur eBay ou Amazon. Ils sont généralement livrés avec une antenne intérieure simple, qui donne de très bons résultats. Je peux recevoir des avions qui sont à plus de 140 km du côté où j’ai une vue dégagée sur le ciel. Pour des résultats encore meilleurs vous pouvez construire votre propre dipôle.
La conclusion d’Erik
« Le Pi tourne sans discontinuer, c’est vraiment stable. Il va falloir que je pense à installer l’antenne un peu mieux que sur un trépied pour améliorer la couverture vers Nantes et la Vendée, trop faible pour le moment.«
Pygmalion vous explique comment configurer le Raspberry Pi
Le récepteur fonctionne sur un Raspberry Pi. Dans son article Erik indique qu’il a configuré le RasPi en suivant le tutoriel de Pygmalion. Celui-ci étant en anglais, je vous en propose la traduction.
Et le Raspberry Pi là dedans ?
Bin oui, jusque là c’était un peu l’arlésienne… Mais le voici : Erik a utilisé un tutoriel de Pygmalion dont je vous propose ici la traduction.
Introduction
Un dongle USB DVB-T peut être utilisé pour recevoir les signaux ADS-B, qui peuvent être décodés avec le logiciel approprié.
Installez les outils de construction du logiciel et la librairie requise
Si vous n’avez pas installé les outils de construction utilisez la commande suivante. Vous devez également libusb-1.0-0-dev.
sudo apt-get -fym install git cmake build-essential libusb-1.0-0-dev
Installation de rtl-sdr
Le pack logiciel contient la bibliothèque chargée de communiquer avec le dongle DVB-T (Digital Video Braodcasting-Terrestrial) et un certain nombre d’outils pour l’utiliser comme SDR (Sofware Defined Radio).
mkdir git cd git git clone git://git.osmocom.org/rtl-sdr.git cd rtl-sdr mkdir build cd build cmake .. -DINSTALL_UDEV_RULES=ON sudo make install sudo ldconfig sudo cp ../rtl-sdr.rules /etc/udev/rules.d/
Comme nous ne voulons pas regarder la télévision le pilote DVB-T par défaut doit être supprimé dans la liste noire. Créez le fichier suivant:
/etc/modprobe.d/rtlsdr.conf
Ajoutez lui la ligne suivante :
blacklist dvb_usb_rtl28xxu
Vérifiez si le module est chargé :
lsmod | grep dvb_usb_rtl28xxu
S’il est chargé, supprimez le en exécutant cette commande :
sudo modprobe -r dvb_usb_rtl28xxu
Installer et exécuter Dump1090
Ce logiciel est utilisé pour recevoir et décoder le signa ADS-B. Il permet également de représenter les données que vous aurez collectées sur une page web.
cd ~/git git clone git://github.com/MalcolmRobb/dump1090.git cd dump1090 make ./dump1090 --quiet --net --enable-agc &
Maintenant ouvrez une page web à l’adresse de votre Raspberry Pi sur le port 8080 et vous devriez voir une carte avec les données de tous les avions à portée. Vous pourriez avoir envie de présenter ceci dans votre propre page web :
<!DOCTYPE html> <head> <meta charset="utf-8"> <meta http-equiv="X-UA-Compatible" content="IE=edge,chrome=1"> <title>Flight Radar Kranenburg-Nütterden</title> <meta name="description" content="Flight Radar (ADS-B Receiver) Kranenburg-Nütterden"> <meta name="viewport" content="width=device-width, initial-scale=1"> <link rel="stylesheet" href="css/main.css"> </head> <body> <h4>Flight Radar (ADS-B Receiver) Kranenburg-Nütterden</h4> <iframe src="http://nitri.ddns.net:8080" name="flight-radar" width="95%" height="90%" align="center" scrolling="no" marginheight="0" marginwidth="0" frameborder="0"></iframe> </body> </html>
Personnaliser Dump1090
Le script config.js se trouve dans le répertoire public_html de Dump1090. Recherchez cette section dans script.js si vous voulez modifier la carte.
// Define the Google Map
var mapOptions = {
center: new google.maps.LatLng(CenterLat, CenterLon),
zoom: ZoomLvl,
mapTypeId: google.maps.MapTypeId.TERRAIN,
mapTypeControl: true,
streetViewControl: false,
mapTypeControlOptions: {
mapTypeIds: mapTypeIds,
position: google.maps.ControlPosition.TOP_LEFT,
style: google.maps.MapTypeControlStyle.DROPDOWN_MENU
}
A mon avis la carte normale donne de bons résultats mais si vous voulez utiliser la carte OpenStreetMap :
mapTypeId: "OSM"
Personnalisez l’apparence de la couche données dans config.js. L’exemple ci-dessous devrait vous aider :
// -------------------------------------------------------- // // This file is to configure the configurable settings. // Load this file before script.js file at gmap.html. // // -------------------------------------------------------- // -- Output Settings ------------------------------------- // Show metric values Metric = true; // true or false // -- Map settings ---------------------------------------- // The Latitude and Longitude in decimal format CONST_CENTERLAT = 51.785982; CONST_CENTERLON = 6.059338; // The google maps zoom level, 0 - 16, lower is further out CONST_ZOOMLVL = 10; // -- Marker settings ------------------------------------- // The default marker color MarkerColor = "rgb(127, 127, 127)"; SelectedColor = "rgb(225, 225, 225)"; StaleColor = "rgb(190, 190, 190)"; // -- Site Settings --------------------------------------- SiteShow = true; // true or false // The Latitude and Longitude in decimal format SiteLat = 51.785982; SiteLon = 6.059338; SiteCircles = true; // true or false (Only shown if SiteShow is true) // In nautical miles or km (depending settings value 'Metric') SiteCirclesDistances = new Array(40,80);
Partagez vos données avec FlightRadar24
Pour partager vos données avec FlightRadar24, vous devez fournir un flux compatible TCP30003 :
./dump1090 --quiet --net --net-sbs-port 30003 --enable-agc &
Installez le logiciel :
mkdir fr24 cd fr24/ wget https://dl.dropboxusercontent.com/u/66906/fr24feed_arm-rpi_242.tgz tar zxvf fr24feed_arm-rpi_242.tgz
Inscrivez vous pour obtenir une clé :
./fr24feed_arm-rpi_242 --signup
Remplissez le questionnaire. Vous aurez besoin des coordonnées décimales de votre récepteur. Une fois que vous aurez obtenu la clé, vous pouvez partager vos données.
./fr24feed_arm-rpi_242 --fr24key=<key> --bs-ip=127.0.0.1 --bs-port=30003
Lancer le logiciel au démarrage du Raspberry Pi
Plusieurs approches sont possibles. J’ai créé plusieurs scripts pour démarrer le système de réception ADS-B/
/home/pi/start_flight_radar.sh
#!/bin/sh cd /home/pi/git/dump1090/ ./dump1090 --quiet --net --net-sbs-port 30003 --enable-agc& pkill -f fr24feed /home/pi/fr24/fr24feed_arm-rpi_242 --fr24key=<key> --bs-ip=127.0.0.1 --bs-port=30003
/etc/init.d/flightradar
#!/bin/bash # /etc/init.d/flightradar ### BEGIN INIT INFO # Provides: flightradar # Required-Start: $remote_fs $syslog # Required-Stop: $remote_fs $syslog # Default-Start: 2 3 4 5 # Default-Stop: 0 1 6 # Short-Description: Flight Radar # Description: Flight Radar (ADS-B Receiver) ### END INIT INFO case "$1" in start) echo "Starting flightradar" /home/pi/start_flight_radar.sh & ;; stop) echo "Stopping flightradar" killall dump1090 ;; *) echo "Usage: /etc/init.d/flightradar start|stop" exit 1 ;; esac exit 0
N’oubliez pas de rendre le script exécutable et de configurer update-rc.d
sudo chmod +x /etc/init.d/flightradar sudo update-rc.d flightradar defaults
Le système de réception ADS-B de Pygmalion
Conclusion
Désolé si cet article vous a semblé un peu long avant d’arriver à la partie qui vous concerne si vous êtes uniquement RasPinaute… Il m’a semblé intéressant de présenter un peu plus en détails la réception ADS-B qui est réalisable avec des moyens réduits.
Avec un dongle DVB-T à une dizaine d’euros et son antenne de m… très simple, il est déjà possible de recevoir quelques trames lorsque les avions passent au dessus de chez vous… Alors imaginez en installant une antenne un peu plus évoluée
Et un jour où la propagation est favorable, vous aurez peut-être la surprise, comme Erik (le point rouge sur la carte), de découvrir que vous pouvez suivre une multitude d’avions situés à grande distance…
 Si le sujet vous intéresse, rejoignez le forum de framboise314 : Un tutoriel de Mmega vous y attend, ainsi qu’une intéressante discussion sur l’ADS-B…
Si le sujet vous intéresse, rejoignez le forum de framboise314 : Un tutoriel de Mmega vous y attend, ainsi qu’une intéressante discussion sur l’ADS-B…
Mes tests de réception au Creusot
C’est du vite fait pour vérifier la faisabilité :
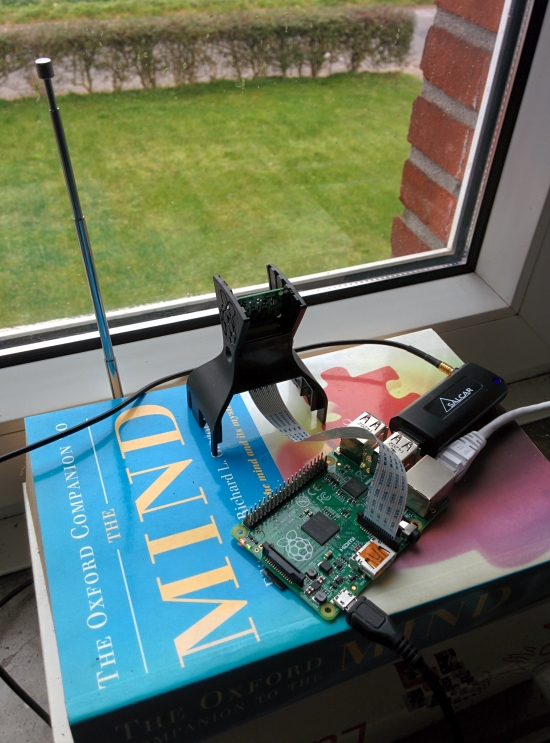
- 1 Raspberry Pi 2
- 1 carte SD 16Go Samsung
- 1 clé DVB-T modèle SPC-0155
- 1 antenne livrée avec la clé USB
C’est pas l’installation rêvée puisque j’ai posé l’antenne sur le rebord de fenêtre (métallique) d’un bâtiment industriel le toit est en plus entouré d’un bardage métallique de 3m de haut…
 Le récepteur est quand à lui connecté directement sur le câble d’origine qui fait au moins… 1 mètre de long ainsi que sur le Raspberry Pi :
Le récepteur est quand à lui connecté directement sur le câble d’origine qui fait au moins… 1 mètre de long ainsi que sur le Raspberry Pi :
 L’antenne est la prise en haut à droite de l’image. LE RasPi est connecté au réseau, ce qui m’a permis d’observer sur la carte mes premiers avions (yep !)
L’antenne est la prise en haut à droite de l’image. LE RasPi est connecté au réseau, ce qui m’a permis d’observer sur la carte mes premiers avions (yep !)
 J’ai tracé un cercle de 110 Km de rayon autour du Creusot et on voit que même avec des moyens très limités (pour ne pas dire primitifs!) il est possible de recevoir les trames ADS-B d’avions situés à plus de 100Km… Imaginez si l’antenne est une colinéaire placée en haut d’un mât avec un préampli
J’ai tracé un cercle de 110 Km de rayon autour du Creusot et on voit que même avec des moyens très limités (pour ne pas dire primitifs!) il est possible de recevoir les trames ADS-B d’avions situés à plus de 100Km… Imaginez si l’antenne est une colinéaire placée en haut d’un mât avec un préampli
Personnalisation de l’affichage de Dump1090
Il est possible de personnaliser votre affichage comme indiqué plus haut. Pour ma part, /home/pi/git/dump1090/public_html/config.js est modifié comme suit :
// -------------------------------------------------------- // // Ce fichier permet de modifier l'affichage sous Dump1090. // Chargez ce fichier avant script.js dans gmap.html. // // -------------------------------------------------------- // -- Valeurs de sortie ------------------------------------- // Affichage métrique : true pour afficher en km Metric = true; // true ou false // -- Configuration de la carte ----------------------------- // Latitude et Longitude en format décimal // Indique le centre de la carte qui sera affichée // J'ai choisi de centrer sur mon antenne ADS-B CONST_CENTERLAT = 46.799107; CONST_CENTERLON = 4.418899; // Niveau de zoom google map de 0 à 16, 0 est le plus éloigné CONST_ZOOMLVL = 5; // -- Paramètres des marqueurs ------------------------------- // Couleur par défaut des marqueurs MarkerColor = "rgb(127, 127, 127)"; SelectedColor = "rgb(225, 225, 225)"; StaleColor = "rgb(190, 190, 190)"; // -- Configuration du site de réception --------------------- // true affiche une cible aux coordonnées indiquées // Pour moi : les coordonnées de l'antenne SiteShow = true; // true ou false // Latitude et Longitude en format décimal SiteLat = 46.799107; SiteLon = 4.418899; // -- Dessin des cercles donnant la distance des avions ------ // Les cercles ne sont affichés que si SiteShaw est sur true SiteCircles = true; // true ou false // In miles nautiques ou en km (selon la valeur de 'Metric') // J'ai choisi d'afficher des cercles à 50km, 100km, 150km et 200km SiteCirclesDistances = new Array(50,100,150,200);
Le résultat
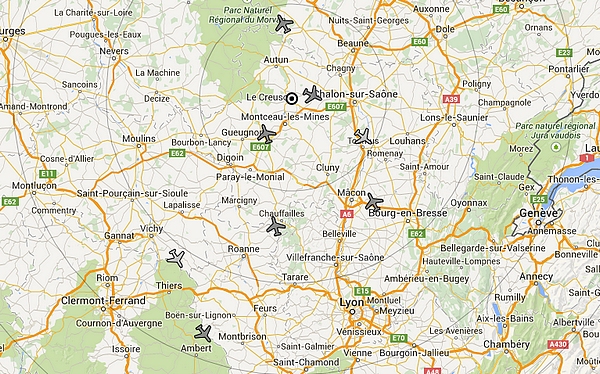 Un dimanche après midi d’avril à 15 heures… L’antenne est la petite antenne d’origine livrée avec la clé USB/TNT posée sur un appui de fenêtre. Les cercles permettent d’estimer rapidement la distance de l’avion. J’attends avec impatience de pouvoir tester une « vraie » antenne et un préampli 1090MHz qui est en chemin depuis le Japon.
Un dimanche après midi d’avril à 15 heures… L’antenne est la petite antenne d’origine livrée avec la clé USB/TNT posée sur un appui de fenêtre. Les cercles permettent d’estimer rapidement la distance de l’avion. J’attends avec impatience de pouvoir tester une « vraie » antenne et un préampli 1090MHz qui est en chemin depuis le Japon.
Vous pouvez voir le résultat sur RaspiBlog, un serveur hébergé par … un Raspberry Pi qui comporte une page dédiée pour l’affichage des avions aux alentours de LE CREUSOT (71)
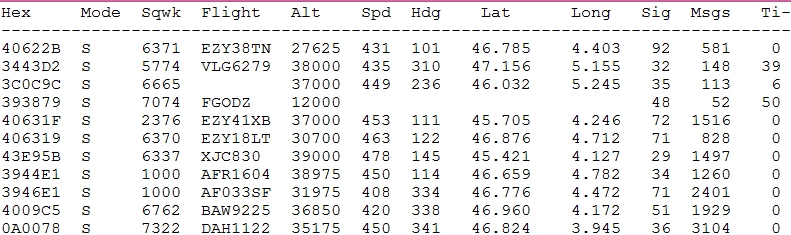
L’affichage sur la console du Raspberry Pi
Dump1090 possède de nombreuses options accessibles par la commande
./dump1090 --help
----------------------------------------------------------------------------- | dump1090 ModeS Receiver Ver : 1.10.3010.14 | ----------------------------------------------------------------------------- --device-index <index> Select RTL device (default: 0) --gain <db> Set gain (default: max gain. Use -10 for auto-gain) --enable-agc Enable the Automatic Gain Control (default: off) --freq <hz> Set frequency (default: 1090 Mhz) --ifile <filename> Read data from file (use '-' for stdin) --interactive Interactive mode refreshing data on screen --interactive-rows <num> Max number of rows in interactive mode (default: 15) --interactive-ttl <sec> Remove from list if idle for <sec> (default: 60) --interactive-rtl1090 Display flight table in RTL1090 format --raw Show only messages hex values --net Enable networking --modeac Enable decoding of SSR Modes 3/A & 3/C --net-beast TCP raw output in Beast binary format --net-only Enable just networking, no RTL device or file used --net-bind-address <ip> IP address to bind to (default: Any; Use 127.0.0.1 for private) --net-http-port <port> HTTP server port (default: 8080) --net-ri-port <port> TCP raw input listen port (default: 30001) --net-ro-port <port> TCP raw output listen port (default: 30002) --net-sbs-port <port> TCP BaseStation output listen port (default: 30003) --net-bi-port <port> TCP Beast input listen port (default: 30004) --net-bo-port <port> TCP Beast output listen port (default: 30005) --net-ro-size <size> TCP raw output minimum size (default: 0) --net-ro-rate <rate> TCP raw output memory flush rate (default: 0) --net-heartbeat <rate> TCP heartbeat rate in seconds (default: 60 sec; 0 to disable) --net-buffer <n> TCP buffer size 64Kb * (2^n) (default: n=0, 64Kb) --lat <latitude> Reference/receiver latitude for surface posn (opt) --lon <longitude> Reference/receiver longitude for surface posn (opt) --fix Enable single-bits error correction using CRC --no-fix Disable single-bits error correction using CRC --no-crc-check Disable messages with broken CRC (discouraged) --phase-enhance Enable phase enhancement --aggressive More CPU for more messages (two bits fixes, ...) --mlat display raw messages in Beast ascii mode --stats With --ifile print stats at exit. No other output --stats-every <seconds> Show and reset stats every <seconds> seconds --onlyaddr Show only ICAO addresses (testing purposes) --metric Use metric units (meters, km/h, ...) --snip <level> Strip IQ file removing samples < level --debug <flags> Debug mode (verbose), see README for details --quiet Disable output to stdout. Use for daemon applications --ppm <error> Set receiver error in parts per million (default 0) --help Show this help Debug mode flags: d = Log frames decoded with errors D = Log frames decoded with zero errors c = Log frames with bad CRC C = Log frames with good CRC p = Log frames with bad preamble n = Log network debugging info j = Log frames to frames.js, loadable by debug.html
Si vous souhaitez afficher un tableau plus lisible que le défilé rapide des messages envoyé par dump1090 vers la console du Raspberry Pi, ajoutez – – interactive à la ligne de commande, vous pourrez lire ce tableau, identique à celui qui apparait sur la page web :
Sources
- http://blogwifi.fr/?p=13353
- http://blogwifi.fr/?p=13343
- http://pygmalion.nitri.de/flight-radar-with-raspberry-pi-and-an-sdr-dongle-637.html
- http://www.flightradar24.com
- http://antirez.com/news/46
- http://www.capital.fr/bourse/actualites/flightradar24-ce-site-stupefiant-que-le-grand-public-a-decouvert-avec-le-crash-de-l-a320-1026205
- http://www.balarad.net/
- http://f5ann.pagesperso-orange.fr/
- http://www.rtl-sdr.com/homemade-ads-b-filter/
- http://forum.flightradar24.com/archive/index.php/t-3831.html
- http://antirez.com/news/46
- http://forums.framboise314.fr/viewtopic.php?f=36&t=65&p=6619#p1844